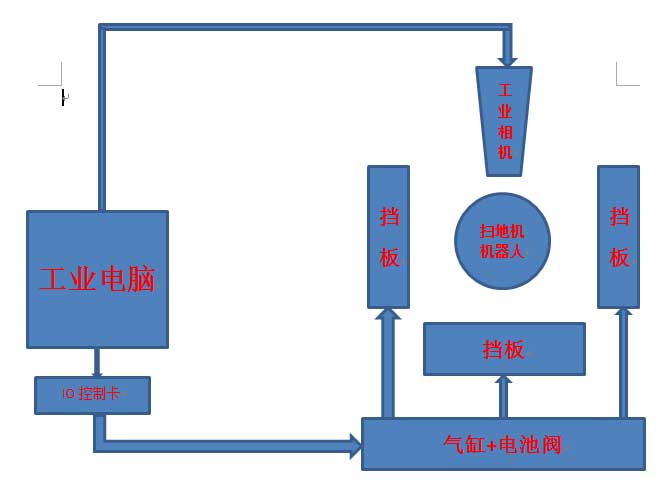
1. 扫地机器人自动测试系统 2. 测试系统框图说明
图1 . 测试系统框图 图1是扫地机器人自动测试系统的框图,工业电脑通过IO控制卡,控制气缸和电磁阀推动档板上升下降等动作模拟实际的情况,然后从扫地机器人处得到信息,就可以判断是否测试通过。其中面板灯由相机照相来测试是否通过,如果过了的话,就告诉通过该次测试然后,将所有的测试项目测试通过,最后将测试结果反馈出来。
4.测试项及测试方法 4.1 开机及面板灯测试 连续按三下SPOT按键(使用气缸的一个顶住按键),扫地机器人开机,面板灯全亮,这个时候电脑控制相机拍摄图片,软件分析图片,判断面板灯是否正常。如下图:
图2 . 软件分析面板灯测试结果图 如上图2,这里面绿色的框说明测试通过了,红色的框说明测试失败。对于每个项目,我们用方框标注出需要测试的面板灯,软件就可以按照需求分析出每个面板灯的状态,给出测试结果。 4.2 缓冲器测试 通过气缸按压左边泵把,从串口读取数据,软件判断是否测试通过,松开左边泵把,从串口读取数据,软件判断是否测试通过,如果两边测试都通过,则判定此项测试通过。 4.3 抬左右测试 1.将左边的感应器处挡板拉低,持续1秒,再拉高,从串口读取数据,软件判断是否通过. 2.将右边的感应器处挡板拉低,持续1秒,再拉高,从串口读取数据,软件判断是否通过. 以上两项测试都通过,则判定此项测试通过。 4.4 抬左前右前测试 1.将左前的感应器处挡板拉低,持续1秒,再拉高,从串口读取数据,软件判断是否通过. 2.将右前的感应器处挡板拉低,持续1秒,再拉高,从串口读取数据,软件判断是否通过. 以上两项测试都通过,则判定此项测试通过。 4.5 其他感应测试 其他的一些感应测试与上面的描述类似,在感应器旁边放置感应器以此来验证是否能够将感应是否正常! 4.6 充电感应测试 当没有挡板的时候,从串口读取数据,软件判断没有感应到充电器 当有挡板的时候,从串口读取数据,软件判断有感应到充电器 以上两个都感应到当认为充电器测试通过
图3 . 充电器感应测试原理图 4.7 左右轮测试 左右轮测试。 让左右轮旋转,然后让其夹住,从串口读取数据,软件判断是否测试通过。 4.7 主涮测试 让主涮旋转,然后由上下机件使其阻挡其旋转,然后从串口读取数据,软件判断是否测试通过。 4.8 垃圾箱测试
图4 . 吸垃圾测试原理图 启动垃圾测试,扫地机器人开始吸垃圾,软件通过气缸将垃圾箱抬上,扫地机器人吸到垃圾后,软件判断是否测试通过,其原理见上图。 4.9 其他一些测试 按照客户提供的其他一些资料,通过电脑控制都可以完成其他一些需要手动做的相应的测试项。 |
- 解决方案
- • 扫地机器人自动测试系统
- • 激光打标机自动上下料系统
- • 密封性漏气性防水性自动测试系统
- • 自动光学检测设备(AOI)
- • 车载信息终端自动化测试系统
- • 芯片到装贴片系统
- • 无线通讯模块自动化功能测试解决方案
- • 无线通讯模块开短路测试解决方案
- • 手机,通讯模块射频自动化测试方案
- • 手机功能自动化测试方案
- • GPS模块自动化测试解决方案
- • 自动电位器调节校准测试系统
- • 汽车轮速/位置传感器测试系统